ANTES Y DEPUES. Foto inicial donde se observa enfermedad periodontal avanzada y ausencias dentales en primer y segundo cuadrante compensadas mediante voladizos protésicos. Foto final que muestra la prótesis definitiva de metal-composite.
Caso clínico elaborado por expertos en Cirugía Bucal e Implantología de la Universidad de Valencia, España, que explican el tratamiento con el sistema “All-on-four” de un paciente con dentición terminal. Los autores son también los directivos de una primicia en el campo de la educación odontológica: el Primer Master Internacional ONLINE en Cirugía Oral e lmplantología, curso universitario que comienza en septiembre de 2020. Más información al final del artículo.
Introducción
Las técnicas sin injerto (graftless) y carga inmediata han ganado popularidad en los últimos años en el tratamiento del paciente desdentado o con dentición terminal, gracias a su versatilidad, inmediatez, menor morbilidad y costo económico, así como sus excelentes resultados en cuanto a supervivencia de implantes y prótesis1. También, debido a una mayor aceptación y preferencia de los pacientes en comparación a las técnicas más tradicionales con injertos previos2.
La técnica del “all-on-four” consiste en la colocación de cuatro implantes y una prótesis fija de arco completo de carga inmediata durante la primera semana tras la cirugía. En su variante más clásica, en el maxilar superior, los implantes distales se inclinan alrededor de 30 grados siguiendo la pared anterior del seno maxilar y los dos implantes anteriores se colocan paralelos a la línea media3. Esta disposición permite que la emergencia de los implantes sea más posterior que si se colocaran rectos, lo que permite una mejor distribución antero-posterior (A-P) de las fijaciones y una reducción del tamaño o longitud de los voladizos protésicos4.
El objetivo del siguiente caso clínico es presentar un paciente con dentición terminal debido a periodontitis y fracturas radiculares, con implantes e injertos en seno previos fracasados, que presenta comunicación orosinusal y una grado V de atrofia según Cawood y Howell5, rehabilitado mediante la técnica de “all-on-four”.
Caso clínico
Paciente de 65 años, sin patología sistémica de interés, acudió a la Unidad de Cirugía Bucal de la Universitat de València refiriendo movilidad del puente sobre implantes del segundo cuadrante, dolor en la región malar izquierda y mal sabor de boca. El paciente refiere antecedentes de elevación de seno en el segundo cuadrante y posterior colocación de implantes. También, que hace un año perdió un implante, pero que le volvieron a cementar el puente tras la explantación. Desde entonces tiene molestias recurrentes en la zona.
En la exploración intraoral se observa la movilidad del puente sobre implantes 24-26 debido a la ausencia del implante posterior y periimplantitis en el implante 24. Enfermedad periodontal avanzada en el resto de la dentición, la ausencia de todos los dientes del primer cuadrante (salvo 11) y la fractura del diente 23 (Fig. 1).
Fig. 1. Imagen frontal preoperatoria. Enfermedad periodontal avanzada y ausencias dentales en primer y segundo cuadrante compensadas mediante voladizos protésicos.
A la palpación, el paciente refiere molestia y dolor en el hemimaxilar izquierdo. Al paciente se le solicita la realización de una ortopantomografía (Fig. 2) y de una tomografía computarizada de haz cónico (TCHC) (Fig. 3).
2. En la ortopantomografía inicial se observa la extensión de los voladizos y el grado severo de enfermedad periodontal. Periimplantitis en el implante 24, fractura de 23 y proceso patológico en seno maxilar izquierdo debido a un fracaso de una elevación sinusal previa.
Fig. 3. Reconstrucción tridimensional a partir de TCHC. Vista lateral donde se observa la periimplantitis del implante 24 y proceso patológico sinusal.
En las pruebas radiológicas se confirma el grado de severidad de la enfermedad periodontal, así como de la periimplantitis del implante 24. En el corte panorámico de la TCHC se observa la ocupación completa del seno maxilar izquierdo, material de injerto radiopaco disperso y la presencia de comunicación orosinusal (Fig. 4).
El corte axial (Fig. 5) nos da otra perspectiva sobre el grado de ocupación del seno, observándose la presencia de restos de material de injerto en toda su extensión latero-medial, hasta la pared interna del seno maxilar.
Fig. 4. Corte panorámico de TCHC. Se observa ocupación del seno maxilar izquierdo junto con fragmentos del biomaterial utilizado en una elevación de seno previa. El paciente fue rehabilitado con un puente de tres piezas tras lo que el implante 26 fracasó y produjo una comunicación orosinusal y sinusitis. Fig. 5. Corte axial donde se observa el seno maxilar izquierdo completamente ocupado y con material de injerto radiopaco disperso.
Los cortes parasagitales (Fig. 6) muestran la fractura radicular del diente 23 y la presencia de comunicación orosinusal a nivel del 26.
Fig. 6. Cortes parasagitales donde se observa fractura de 23 y la comunicación orosinusal a nivel de 26.
Tras el diagnóstico de sinusitis maxilar iatrogénica con comunicación orosinusal, consecuencia del material de injerto infectado y de la pérdida del implante a ese nivel, al paciente se le pautó la siguiente medicación para resolver el proceso patológico agudo: antibiótico sistémico por vía oral (Augmentine® 875/125 mg. 1 comprimido cada 8 horas durante 14 días), corticoides tópicos administrados por vía nasal (Nasonex® (fluorato de mometasona) spray nasal; 3 aplicaciones al día durante 7 días), un vasoconstrictor nasal para mejorar el drenaje nasal (Vicks®spray nasal, (Oximetazolina hidrocloruro)); 3 aplicaciones nasales al día en el lado afectado durante 7 días) y antiinflamatorios no esteroideos (AINEs) por vía oral (ibuprofeno 600 mg. 1 comprimido cada 8 horas durante 12 días).
Tras la resolución del cuadro agudo, se planificó la extracción de los dientes remanentes del maxilar superior y del implante 24 y la realización de un “all-on-four” con una prótesis fija de arco completo el mismo día de la intervención. En la misma intervención se planificó la limpieza del seno maxilar izquierdo y al cierre de la comunicación orosinusal.
En la mandíbula, se decidió el tratamiento periodontal y mantenimiento de los dientes 34, 35, 43, 44 y 45 y la extracción del resto de los dientes junto con la colocación de implantes en 36-37, 46-47 y 33-42.
Previo a la intervención se le extrajo sangre al paciente para la preparación de membranas y tapones de A-PRF+ (Process for PRF®, Niza, Francia), que se utilizarían para el cierre de la comunicación, y se administró anestesia local. Tras la retirada de las prótesis fijas se extrajeron todos los dientes junto con el implante 24, y se observó más claramente la exposición del material de injerto contaminado (Fig. 7).
Fig. 7. Exodoncia de los dientes y explantación del implante 24. Se observa fractura del diente 23 y exposición del material de injerto contaminado del seno maxilar izquierdo.
Se realizó una incisión crestal y él despegamiento a espesor completo del colgajo. A continuación se procedió a la exéresis y legrado de todo el material de injerto infectado, así como del tejido inflamatorio, lo que evidenció la presencia de la comunicación orosinusal (Figs. 8-11).
8. Elevación de colgajo a espesor completo. Obsérvese el material de injerto infectado.
Fig. 9. Comienzo del legrado del material de injerto.
Fig. 10. Eliminación del tejido de granulación del interior del seno maxilar junto con más material de injerto.
Fig. 11. Imagen oclusal del colgajo a espesor completo elevado y de la comunicación orosinusal.
Se procedió a la regularización ósea mediante pinza gubia (Fig. 12). El objetivo de esta regularización es obtener una mayor meseta para la colocación de los implantes, aumentar el espacio protésico y alejar la línea de transición apicalmente. Realizar la mayor parte con pinza gubia tiene la ventaja añadida de la obtención de hueso autólogo para posterior utilización como injerto.
Fig. 12. Regularización ósea con pinza gubia para la obtención de hueso autólogo.
La regularización se terminó con fresa de carburo de tungsteno y pieza de mano e irrigación con abundante suero fisiológico. Tras esto se colocaron cuatro implantes (Galimplant IPX®, Galimplant, Sarriá, Lugo, España), dos anteriores rectos y dos distales angulados aproximadamente a 30 grados siguiendo la pared anterior del seno maxilar (Fig. 13).
Fig. 13. Colocación de cuatro implantes, dos anteriores rectos y dos distales angulados 30 grados (“all-on-four”).
Como todos los implantes alcanzaron un torque de inserción mayor de 35 Nw, se procedió con la colocación de los pilares transepiteliales (Galimplant) tanto rectos como angulados a 30 grados para corregir los disparalelismos y poder confeccionar una prótesis fija de carga inmediata. Tras ello se colocaron los tapones de protección (Fig. 14 y 15).
Fig. 14. Colocación de pilares transepiteliales rectos (implantes anteriores) y angulados de 30 grados en los implantes distales y sus tapones de protección.
Fig. 15. Imagen oclusal donde se observa el paralelismo obtenido gracias a los pilares transepiteliales así como una adecuada distribución antero-posterior (A-P) de los implantes.
Tras limpiar los restos del material de injerto contaminado del seno maxilar, se procedió al cierre de la comunicación colocando varias membranas de A-PRF y la posterior colocación de injerto particulado de hueso autólogo. El material de injerto fue cubierto también con membranas de A-PRF (Figs. 16-19).
Fig. 16. Vista de la comunicación orosinusal una vez retirado todo el material de injerto contaminado y el tejido inflamatorio. Fig. 17. Se utilizan tapones y membranas de A-PRF para el cierre de la comunicación. Fig. 18. El defecto óseo se rellena con hueso autólogo, así como el resto de los defectos periimplantarios. El hueso fue obtenido durante la regularización ósea con pinza gubia. Fig. 19. El injerto es cubierto con membranas de A-PRF.
El resto del hueso autólogo obtenido de la regularización ósea se utilizo para la corrección de defectos periimplantarios y remanentes de alveolos, así como en los procedimientos regenerativos de la mandíbula.
A continuación se procedió a la sutura de los colgajos con puntos simples y colchoneros modificados (Fig. 20).
Fig. 20. Sutura de los colgajos con puntos simples y colchoneros horizontales modificados.
Tras la sutura se colocaron pilares de titanio provisionales sobre los transepiteliales y se verificó su ajuste. Los pilares fueron fijados con resina autopolimerizable a una férula de resina transparente realizada previamente que se utilizó, también, como guía quirúrgica. La guía proporciona la información necesaria (posición de implantes, relación intermaxilar y dimensión vertical) para que el técnico de laboratorio confeccione la prótesis de carga inmediata. Mientras tanto, se procedió a las extracciones en la mandíbula y la colocación de los implantes. Debido a la necesidad de regeneración ósea horizontal en los implantes 33 y 42 con membrana no reabsorbible por el avanzado grado de atrofia, en la mandíbula se colocó una prótesis parcial removible como provisional, previamente confeccionada.
La prótesis superior se colocó el mismo día de la intervención se comprobó su ajuste mediante ortopantomografía y se ajustó la oclusión (Figs. 21 y 22).
Fig. 21. Prótesis de carga inmediata del maxilar superior.
Fig. 22. Ortopantomografía postoperatoria inmediata donde se observan los implantes angulados distales.
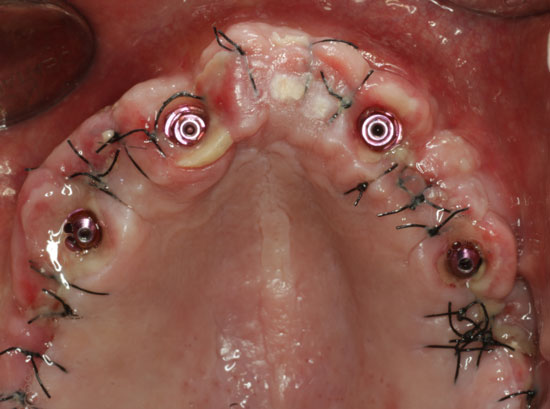
El paciente fue instruido en medidas de higiene oral (gel y enjuagues de clorhexidina al 0,12% 2-3 veces al día) y advertido sobre la necesidad de llevar una dieta semi-blanda durante las primeras semanas. El paciente continuó con la medicación previamente pautada para la sinusitis durante una semana más y se le recetaron AINEs y analgésicos. El paciente fue citado a la semana para control y retirada de suturas y mostró un postoperatorio sin complicaciones (Fig. 23).
Fig. 23. Imagen oclusal a la semana de la cirugía, en el momento de la retirada de puntos. bsérvese como se va modificando la mucosa gracias a la presión controlada de la prótesis de carga inmediata.
Se realizaron controles al mes y tres meses tras la intervención y al cuarto mes se comenzaron los preparativos de la prótesis definitiva, que se confeccionó en metal-composite (Figs. 24 y 25).
Fig. 24. Aspecto de la mucosa al año de la carga. Obsérvese el grado de salud periimplantaria así como el cierre completo de la comunicación.
Fig. 25. Imagen intraoral de la prótesis definitiva de metal-composite.
Al año de la carga se realizó un control radiográfico y mantenimiento, retirando la prótesis definitiva (Figs. 26 y 27). Se observó una excelente higiene oral y mantenimiento de los tejidos blandos periimplantarios, así como una completa estabilidad de del hueso periimplantario y cierre de la comunicación orosinusal.
Fig. 26. Imagen extraoral de la sonrisa del paciente.
Fig. 27. Ortopantomografía de control al año de la carga donde se aprecia la estabilidad del hueso periimplantario.
Discusion
La alternativa de tratamiento tradicional en un caso como este hubiera sido una elevación de seno bilateral y la colocación posterior de seis implantes axiales. Sus desventajas son el alargamiento en el tiempo de tratamiento hasta que el paciente recibiese una prótesis fija funcional (probablemente más de un año), un mayor número de intervenciones quirúrgicas, menos predecible (sería necesario ver cómo responde el seno maxilar izquierdo al tratamiento y posterior injerto) y un mayor costo económico tanto para el paciente como para el profesional. Sin embargo, la elección del “all-on-four” para este caso permitió el tratamiento de la patología sinusal y la rehabilitación del paciente en una misma sesión, al ir los implantes distales angulados, salvando el seno maxilar. Esto supone multitud de ventajas tanto para el profesional como para el paciente, haciendo más fácil la aceptación del tratamiento.
Conclusión
La técnica del “all-on-four” es un tratamiento predecible en pacientes con atrofias grado V y fracasos de injertos previos, pudiendo rehabilitar al paciente con una prótesis fija de arco completo el mismo día de la cirugía. Se trata de una técnica versátil y predecible, ya que permite tratar multitud de escenarios clínicos (con distintos grados de atrofia) y tasas de éxito elevadas tanto en el maxilar como en la mandíbula6,7, rehabilitando al paciente con una prótesis fija de carga inmediata durante la primera semana tras la intervención.
(1) David Peñarrocha-Oltra, Profesor Contratado Doctor, Unidad de Cirugía Bucal, Departamento de Estomatología, Facultad de Medicina y Odontología, Universitat de València, Valencia, España.
(2) Javier Aizcorbe-Vicente, Master Cirugía e Implantología Oral. Unidad de Cirugía Bucal, Departamento de Estomatología, Facultad de Medicina y Odontología, Universitat de València, Valencia, España.
(3) Blanca Serra-Pastor, Profesora Asociada, Unidad de Prótesis y Oclusión. Departamento de Estomatología, Facultad de Medicina y Odontología, Universitat de València, Valencia, España.
(4) Miguel Peñarrocha-Diago, Catedrático de Cirugía Bucal, Unidad de Cirugía Bucal, Departamento de Estomatología, Facultad de Medicina y Odontología, Universitat de València, Valencia, España.
NOTA: Los autores son los directivos de un equipo compuesto por 100 expertos de prestigio internacional que impartirán el Primer Master Internacional ONLINE en Cirugía Oral e lmplantología de la Universidad de Valencia, España. Este Máster universitario es una oportunidad única para aprender de grandes figuras desde la comodidad de tu hogar o clínica. Consulta el programa completo siguiendo el enlace bajo estas líneas.
Peñarrocha-Diego M, Aizcorbe-Vicente J, Ruz-Domínguez V, Soto-Peñaloza D, Peñarrocha-Oltra D. Immediate Loading in All-on-Four. En: Peñarrocha-Digo M, Covani U, Cuadrado L. Atlas of Immediate Dental Implant Loading. 2019. Ed: Springer. Pags: 213-240.
Davo R, Felice P, Pistilli R, Barausse C, Marti-Pages C, Ferrer-Fuertes A, Ippolito DR, Esposito M. Immediately Loaded Zygomatic Implants vs Conventional Dental Implants in Augmented Atrophic Maxillae: 1-year Post-Loading Results From a Multicentre Randomised Controlled Trial. Eur J Oral Implantol. 2018;11:145-161.
Soto-Peñaloza D, Zaragozí-Alonso R, Peñarrocha-Diago M, Peñarrocha-Diago M. The all-on-four treatment concept: systematic review. J Clin Exp Dent. 2017;9:e474-e488.
Brunski JB. Biomechanical aspects of the optimal number of implants to carry a cross-arch full restoration. Eur J Oral Implantol. 2014;7(Suppl2):S111-S131.
Cawood JI, Howell RA. A classification of the edentulous jaws. Int J Oral Maxillofac Sur. 1988;17:232-236.
Niedermaier R, Stelzle F, Riemann M, Bolz W, Schuh P, Wachtel H. Implant-Supported Immediately Loaded Fixed Full-Arch Dentures: Evaluation of Implant Survival Rates in a Case Cohort of Up to 7 Years. Clin Implant Dent Relat Res. 2017;19:4-19
Malo P, Araujo-Nobre M, Lopes A, Ferro A, Nunes M. The All-on-4 Concept for Full-Arch Rehabilitation of the Edentulous Maxillae: A Longitudinal Study With 5-13 Years of Follow-Up. Clin Implant Dent Relat Res. 2019;21:538-549.
Expodental, el Salón Internacional de Equipos, Productos y Servicios Dentales organizado por IFEMA Madrid, con el apoyo de la Federación Española de ...
Un nuevo sistema integra cada etapa de la cirugía oral y la implantología, desde el diagnóstico y el tratamiento hasta la documentación final. El guía ...
Si Per-Ingvar Brånemark devolvió la sonrisa y la posibilidad de masticar a millones de pacientes gracias al descubrimiento de la osteointegración, la ...
La nueva frontera en cirugía implantológica o el robot que podría reemplazar al implantólogo
Clínica
Este sistema robótico parece futurista pero ya ha sido utilizado en más de 10.000 pacientes en China "con resultados muy consistentes”, según la compañía. Imagen: YakeBot Robotic System
Si Per-Ingvar Brånemark devolvió la sonrisa y la posibilidad de masticar a millones de pacientes gracias al descubrimiento de la osteointegración, la irrupción de la robótica podría representar el siguiente gran salto evolutivo en la implantología oral.
No se trata únicamente de una mejora incremental, sino de un posible cambio de paradigma en la forma en que se planifican y ejecutan los tratamientos.
Claudia Zuo, Directora Internacional de Ventas de YakeBot Robotic System, derecha, expresó durante la entrevista con Javier de Pisón en Expodental Madrid, que “la combinación de inteligencia humana y precisión robótica puede llevar la implantología a un nivel completamente nuevo”. Foto: Enrique Jadad
La historia de la implantología moderna comenzó de forma fortuita cuando Brånemark, un investigador y cirujano ortopédico sueco, observó que el hueso humano podía integrarse de manera estable con el titanio. Trece años más tarde, en mayo de 1982, la presentación de estos hallazgos en la Conferencia de Toronto marcó un punto de inflexión en la odontología contemporánea1.
Desde entonces, la implantología oral ha evolucionado de manera constante, incorporando avances tecnológicos que han permitido mejorar la precisión, la predictibilidad y la seguridad de los procedimientos.
La presentación del YakeBot Robotic System en Expodental Madrid 2026, en el recinto ferial de IFEMA, generó una gran expectación.
Hoy, más de cuatro décadas después, la disciplina se encuentra nuevamente en un momento de transformación. La introducción de sistemas robóticos como Yomi o YakeBot Robotic System han despertado un enorme interés en la comunidad odontológica internacional.
Tres instantáneas del YakeBot Robotic System en Expodental Madrid 2026. Fotos: Enrique Jadad
La robótica no solo promete mejorar los resultados clínicos, sino que plantea también preguntas fundamentales sobre el papel del profesional.
Una innovación que no deja indiferente
De hecho, la presentación del YakeBot en Expodental Madrid 2026, celebrada del 11 a 13 de marzo en el recinto ferial de IFEMA, generó una gran expectación entre clínicos, investigadores y empresas del sector. Sin embargo, junto al entusiasmo, también surgieron interrogantes.
“Muchos doctores se acercan con curiosidad, pero también con cierta preocupación”, explica Claudia Zuo, Directora Internacional de Ventas de Beijing YakeBot Technology. “Es normal: estamos hablando de una tecnología que cambia la forma tradicional de trabajar”.
Como ocurre con toda innovación disruptiva, la robótica en implantología no solo promete mejorar los resultados clínicos, sino que también plantea preguntas fundamentales sobre el papel del profesional.
Los sistemas robóticos combinan planificación digital, seguimiento en tiempo real y ejecución automatizada, lo que permite alcanzar resultados más consistentes y reproducibles.
De la cirugía guiada a la cirugía robotizada
La evolución tecnológica en implantología ha seguido una trayectoria clara: desde la cirugía convencional hacia la digitalización progresiva del procedimiento.
La cirugía guiada estática supuso un primer avance en precisión, aunque presenta limitaciones derivadas de errores acumulativos. La navegación dinámica por su parte introdujo la posibilidad de ajustes en tiempo real, pero sigue dependiendo en gran medida de la destreza del operador.
“Lo que buscamos con YakeBot es eliminar esa variabilidad”, afirma Zuo. “El robot ejecuta exactamente lo que se ha planificado, sin desviaciones causadas por el pulso o la fatiga del clínico”.
Los sistemas robóticos representan así una nueva etapa al integrar planificación digital, seguimiento en tiempo real y ejecución automatizada, lo que permite alcanzar resultados más consistentes y reproducibles.
La pregunta que surge es inevitable: ¿puede un robot sustituir al implantólogo?
¿Cómo funciona el YakeBot Robotic System?
El flujo de trabajo comienza con la incorporación en el sistema de las imágenes de CBCT y escaneado intraoral del caso, que permiten realizar una planificación virtual precisa.
“Primero importamos las imágenes y realizamos la simulación de la colocación del implante”, explica Zuo. “Después diseñamos todos los pasos del procedimiento antes de entrar en quirófano”.
A continuación, se lleva a cabo una fase de calibración en la que se sincronizan el robot, la cámara y el paciente.
“Este paso es clave”, señala Zuo. “La cámara reconoce la posición exacta del paciente y del robot. Si el paciente se mueve, el robot se mueve con él”.
La robótica parece redefinir el papel del clínico hacia un perfil más estratégico. Foto: YakeBot Robotic System
Una vez finalizada esta fase, comienza la cirugía. El implantólogo supervisa todo el proceso desde un monitor y controla el sistema mediante un pedal.
“El doctor no pierde el control en ningún momento”, subraya Zuo. “Puede detener el robot o cambiar el modo de trabajo cuando lo necesite”.
Control inteligente y feedback intraoperatorio
Uno de los aspectos más innovadores del sistema es su capacidad para interpretar información en tiempo real.
“El robot no solo sigue un plan”, explica Zuo. “También detecta la densidad del hueso durante el fresado. Si el hueso es más duro o más blando, el sistema lo reconoce y muestra su nivel de densidad en la pantalla”.
Esta combinación de planificación y feedback intraoperatorio permite aumentar la seguridad del procedimiento.
"La robótica es una tecnología que cambia la forma tradicional de trabajar”, afirma Claudia Zuo. Foto: YakeBot Robotic System
Además, el sistema incluye una amplia biblioteca de implantes con la que se puede trabajar. “Tenemos más de 100 marcas integradas”, añade. “Y si un clínico necesita otra, podemos incorporarla”.
Resultados clínicos y experiencia del paciente
Según los datos proporcionados por la compañía, el sistema ha sido utilizado en miles de pacientes, con más de 30.000 implantes colocados.
“En China ya hemos tratado a más de 10.000 pacientes”, afirma Zuo. “Y los resultados son muy consistentes”.
Uno de los aspectos más relevantes es su carácter mínimamente invasivo. “En muchos casos no es necesario levantar colgajo”, explica. “Esto significa menos sangrado, menos dolor y una recuperación más rápida para el paciente”.
Imágenes captadas con CBCT y listas para ser incorporadas al sistema del YakeBot. Foto: YakeBot Robotic System
En cuanto a la duración del procedimiento, Zuo destaca su eficiencia: “Un implante unitario puede realizarse en unos 15 minutos desde el inicio de la fase quirúrgica”.
Formación, costo y adopción tecnológica
El sistema se está introduciendo ahora progresivamente en Europa, especialmente en universidades.
“Las universidades son clave porque permiten formar a los nuevos profesionales en esta tecnología”, señala Zuo. “Pero también estamos trabajando con hospitales y clínicas privadas”.
El precio del sistema, en torno a los 200.000 euros, representa una inversión significativa. “Es una tecnología avanzada, pero creemos que su valor está en la precisión y la seguridad que aporta”, afirma.
La biblioteca del sistema robótico incluye 100 marcas diferentes de implantes. Foto: YakeBot Robotic System
¿Sustitución o transformación del implantólogo?
La pregunta que subyace a toda esta innovación es inevitable: ¿puede un robot sustituir al implantólogo?
Zuo lo tiene claro: “El robot no reemplaza al dotor.El doctor es quien planifica, quien decide y quien supervisa. El robot es una herramienta que ejecuta un plan previamente establecido con precisión”.
Más que una sustitución, la robótica parece redefinir el papel del clínico, que evoluciona hacia un perfil más estratégico.
Ventajas y desventajas de este sistema robótico. Imagen: Dental Tribune
Conclusión
La llegada de sistemas robóticos como YakeBot marca el inicio de una nueva etapa en la implantología oral. Aunque aún existen desafíos relacionados con el costo, la formación y la integración en la clínica, su potencial es evidente.
Como resume Claudia Zuo: “Estamos al principio de un cambio importante. La combinación de inteligencia humana y precisión robótica puede llevar la implantología a un nivel completamente nuevo”.
El futuro, más que una confrontación entre humano y máquina, apunta hacia una colaboración cada vez más estrecha entre ambos.
Para más información visite: www.yakebot.com/home.html
Toque en la imagen para ver el video del YakeBot Robotic System en Expodental Madrid. Video: Enrique Jadad
Autor
Javier Martínez de Pisón,periodista de larga trayectoria, es director de las ediciones Dental Tribune España y Dental Tribune Latinoamérica.
Expodental, el Salón Internacional de Equipos, Productos y Servicios Dentales organizado por IFEMA Madrid, con el apoyo de la Federación Española de ...
Un nuevo sistema integra cada etapa de la cirugía oral y la implantología, desde el diagnóstico y el tratamiento hasta la documentación final. El guía ...
Expertos como Giovanni Zucchelli, Nelson Pinto, Paulo Mesquita, David Herrera, Mariano Sanz, Xiomara Giménez, Lina Suárez, Ana Molina, Alberto Monje, ...
El Libro Blanco de la Salud Oral en España ofrece datos epidemiológicos actualizados con una periodicidad quinquenal, que recogen los resultados de la ...
La odontología en España atraviesa una fase de transformación por factores como el envejecimiento de la población y una mayor demanda de tratamientos, ...
Nuestro experto en marketing odontológico, Juan Carlos Mejía, afirma que quizá vez el verdadero reto de la odontología actual no sea aprender nuevas ...
El experto en marketing odontológico, Juan Carlos Mejía, explica una realidad que muchos profesionales algunas veces no saben reconocer: que el paciente ...
Formación
Webinars en vivo mar. 31 de marzo 2026 13:00 CST (Mexico City)

 Internacional / International
Internacional / International
 Brasil / Brasil
Brasil / Brasil
 Canadá / Canada
Canadá / Canada
 EE UU / USA
EE UU / USA
 Austria / Österreich
Austria / Österreich
 Bosnia y Herzegovina / Босна и Херцеговина
Bosnia y Herzegovina / Босна и Херцеговина
 Bulgaria / България
Bulgaria / България
 Croacia / Hrvatska
Croacia / Hrvatska
 República Checa y Eslovaquia / Česká republika & Slovensko
República Checa y Eslovaquia / Česká republika & Slovensko
 Francia / France
Francia / France
 Alemania / Deutschland
Alemania / Deutschland
 Grecia / ΕΛΛΑΔΑ
Grecia / ΕΛΛΑΔΑ
 Hungría / Hungary
Hungría / Hungary
 Italia / Italia
Italia / Italia
 Países Bajos / Nederland
Países Bajos / Nederland
 Nórdico / Nordic
Nórdico / Nordic
 Polonia / Polska
Polonia / Polska
 Portugal / Portugal
Portugal / Portugal
 Rumania y Moldavia / România & Moldova
Rumania y Moldavia / România & Moldova
 Eslovenia / Slovenija
Eslovenia / Slovenija
 Serbia & Montenegro / Србија и Црна Гора
Serbia & Montenegro / Србија и Црна Гора
 España / España
España / España
 Suiza / Schweiz
Suiza / Schweiz
 Turquía / Türkiye
Turquía / Türkiye
 Reino Unido e Irlanda / UK & Ireland
Reino Unido e Irlanda / UK & Ireland
 China / 中国
China / 中国
 India / भारत गणराज्य
India / भारत गणराज्य
 Paquistán / Pākistān
Paquistán / Pākistān
 Vietnam / Việt Nam
Vietnam / Việt Nam
 Asean / ASEAN
Asean / ASEAN
 Israel / מְדִינַת יִשְׂרָאֵל
Israel / מְדִינַת יִשְׂרָאֵל
 Argelia, Marruecos y Túnez / الجزائر والمغرب وتونس
Argelia, Marruecos y Túnez / الجزائر والمغرب وتونس
 Oriente Medio / Middle East
Oriente Medio / Middle East

 Bárbara Bravo SilvaWebinars en vivo
Bárbara Bravo SilvaWebinars en vivo

 Dr. Anthony Mak B.D.S, Prof. Marleen PeumansRegístrate ahora1CEWebinars en vivo
Dr. Anthony Mak B.D.S, Prof. Marleen PeumansRegístrate ahora1CEWebinars en vivo
 Nacho Fernández-Baca DDS, MScRegístrate ahora1CEWebinars
Nacho Fernández-Baca DDS, MScRegístrate ahora1CEWebinars
 Dr. Jose Carlos Rosas Diaz DDS
Dr. Jose Carlos Rosas Diaz DDS

























































































")
")







To post a reply please login or register